
ニッパーの話題が出ていたので、ウチの1軍、2軍たち
■1軍
GodHandのアルティメットニッパーはついに4本目(片刃ニッパーの使い方が分かっていなかったり、油断したり、失敗もこれまで何回も。。。)
アルティメットニッパーに続いて、入手性と切れ味という意味で、ヌルっとニッパーも中々
■2軍
タミヤの薄刃ニッパー、ボークス造形村のプロ絶ニッパー
これまた切れ味が良く、ゲート跡処理をするのであれば、寧ろ気兼ねなく使える分便利だったり
■3軍
写真に撮っていませんが、雑にレジンキャストを切り取ったり、太めのランナーを切ったりするニッパーも、あと何本か
シンゴ
さんがブースト

{kind=link}
AIで3D化ないしはdepth計算してlooking grassに出力できるようにしたい。時間が......
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
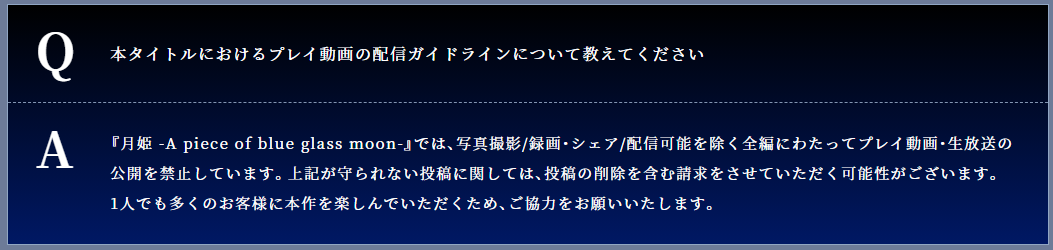
当初の予定から随分変わりましたが、月姫リメイクこと「月姫 -A piece of blue glass moon-」を進めてます。
今のところ基本的なストーリー進行はオリジナルと変わらないものの、細かいところに手が入ってますねぇ
不穏な新キャラとかも、ちょこちょこ登場しているし。。。
公式サイトでは、発売後 2週間はネタバレを控えるよう通知が出ていますが、現時点でゲーム全編に渡ってスクリーンショットが撮れない設定になっているのは、もしかして、それも時限性だったりするとか。。。?
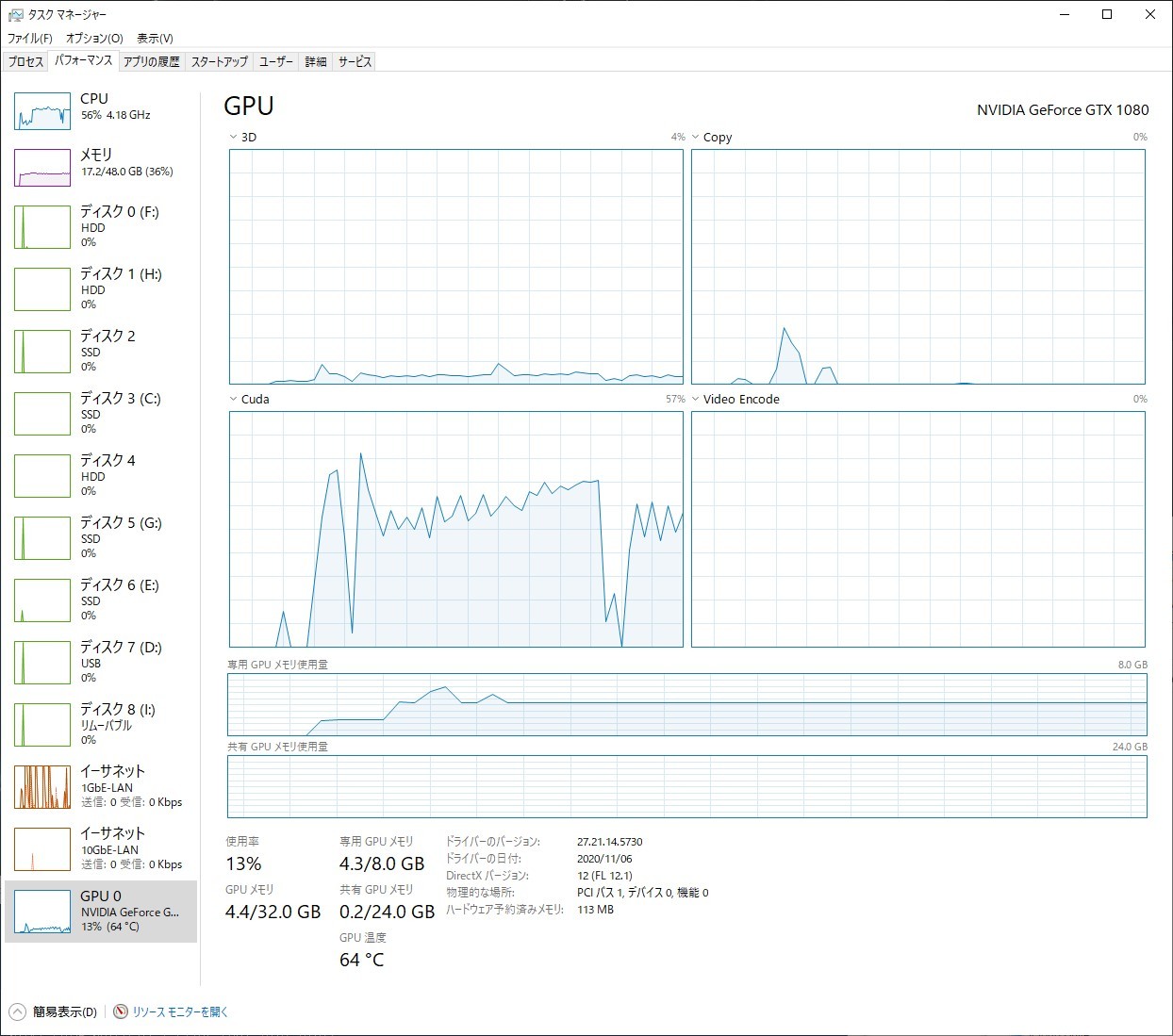
今日はPS5を色々弄るつもりだったのですが、一つのリプライTweetきっかけで、予定が大幅に変更になりました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@skawa やり方に迷ったのが、PyTorchのインストールのところで、私は以下のサイトを参考にしてインストールしました。
PyTorch のインストール (Windows 上)
https://www.kkaneko.jp/tools/win/pytorch.html
ざっくりメモ 続き
@skawa
6. LeResの学習済みの重みデータをダウンロード
res101.pth(518MB)
所定のパスへ
7. pythonの実行環境で、run.pyを実行。オプションのdepthNetは2で。
これでMR_LeResの方のデプスマップが生成されます。
8. ステレオフォトメーカーで元画像と生成したデプスマップを読み込み、Looking Glass Portrait用のRGBDデータを保存
MR_LeResで生成されたデータは、深度情報が反転しているので、ステレオフォトメーカーの「デプスマップ」⇒「デプスマップ反転」しておく。
(一般的には、こちらの方が標準的らしい?)
時間があれば、まとめるかもしれませんが、ざっくりメモ
■メソッドはこれ
https://github.com/compphoto/BoostingMonocularDepth
1. Pythonの機械学習の環境を作る
私の場合、Pythonは触ったことが無かったので、以下の導入手順を手探りで実施
http://stereo.jpn.org/jpn/stphmkr/google/index.html
更に「Environments」の直下にあるpytorch環境も導入
導入の仕方も、ググってどうにか入れる
2. GitHub上の資源をまとめて落として展開
3. merge net model の学習済みの重みデータをダウンロード
latest_net_G.pth(310MB)
して、所定のパスへ
4. MiDaS-v2の学習済みの重みデータをダウンロード
model.pt(412MB)
5. pythonの実行環境で、run.pyを実行。オプションのdepthNetは0で。
これでMR_MiDaSの方のデプスマップが生成されます。
(続く)
フィギュアやプラモデルといった被写体に対しては、マルチ解像度のMiDaS方式の方がスッキリしたデプスマップが作られる傾向にあったので、今度は傾向の違う写真でテスト
元データは、2018年11月にdaruimonさん、ジャーマネ、ryo-sukeさんたちとアキヨド 8階の飲み屋で撮った写真(懐かしい!)
こちらはMiDaS(1枚目)より、LeRes(2枚目)の方が、全体的に情報量が多いですね。
{kind=link}
{kind=link}
後でもっとデータを追加してみるつもりですが、各デプスマップ生成法で作ったLooking Glass Portrait用データです。
ファイル名の命名ルールは以下のような感じで
*_depth:Google APIを使用
*_MiDaS:MiDaS-v2を単独
*_MR_MiDaS:マルチ解像度合成 生成にはMiDaSを使用
*_MR_LeRes:マルチ解像度合成 生成にはLeResを使用
ということで各手法の関係性を整理して、再度デプスマップ生成
1枚目:オリジナル画像
2枚目:MiDaS-v2単独で生成したデプスマップ
3枚目:MiDaS-v2ベースで、複数解像度マージで生成したデプスマップ
4枚目:LeResベースで、複数解像度マージで生成したデプスマップ
LeRes単独実行はモジュールが不足しているというエラーが発生したので未確認
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2017年 4月 に登録
