
シンゴ
さんがブースト

@shingo1228 シンゴさん進展してますね~
こちらはステレオフォトメーカー関連で
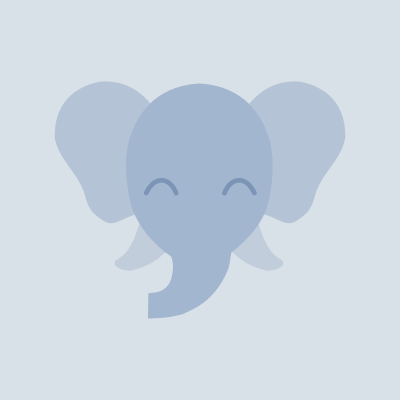
Google公開のソフトを使った、2D画像からデプスマップの作成
http://stereo.jpn.org/jpn/stphmkr/google/index.html
というやつの環境構築中です
Pythonを全く知らないところからとりあえず順に入れてますが説明ではpipでインストールしろってなってるけどpytorchの提供サイトではcondaで入れてくれ~ってなってたりで少しづつ進めてます
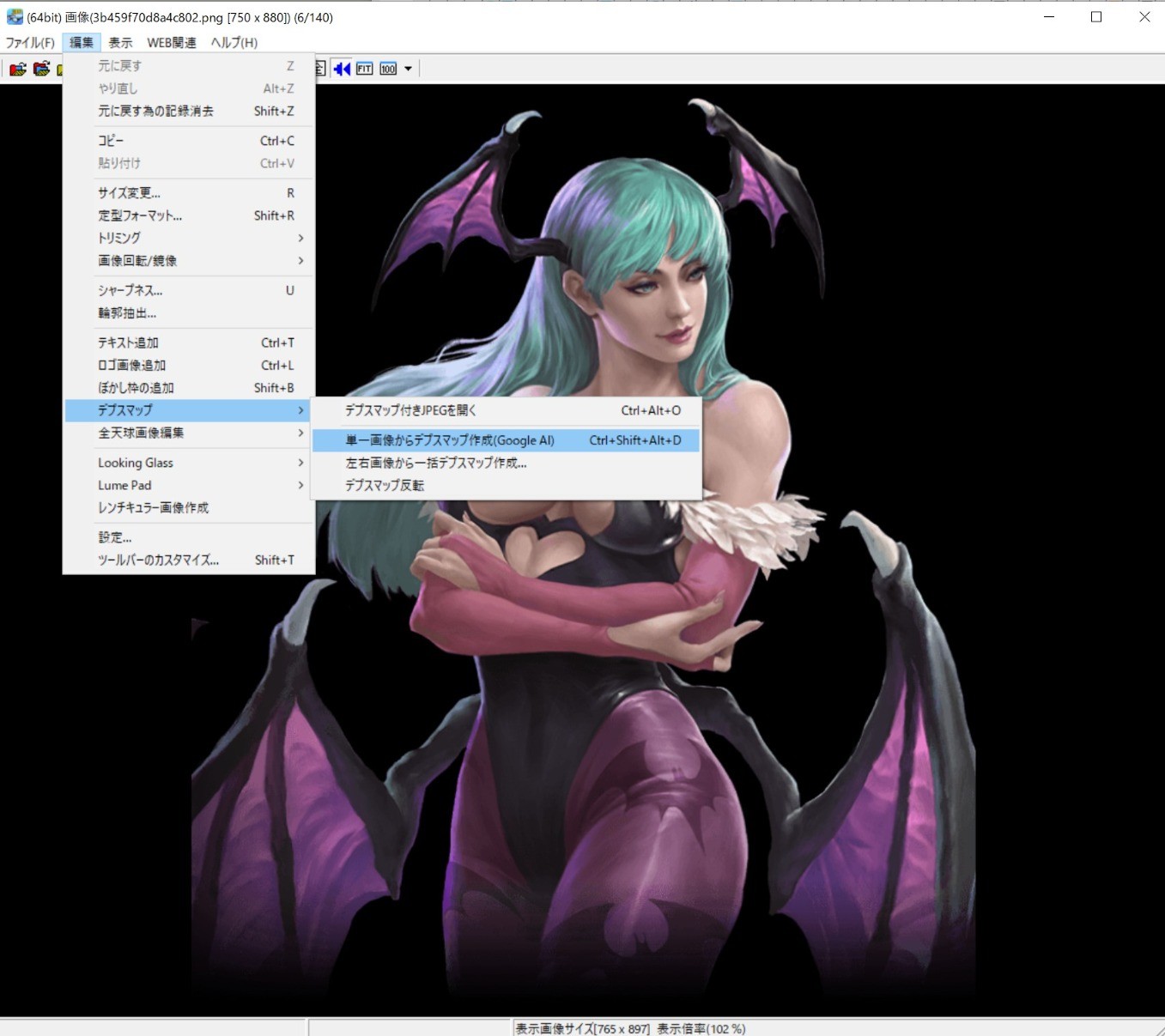
うまくいって1枚の画像からデプスマップが作れたら胸熱なんですけどね~
Google AIの画像から深度情報を推定する公開APIを呼び出して、手持ちの純粋な2D画像から深度マップを生成する、なんてアプローチもしているんですね。。。
シンゴ
さんがブースト
@shingo1228 Google AIを使って単体の2D写真からディプスマップ作るのにも対応してるみたいなので
http://stereo.jpn.org/jpn/stphmkr/google/index.html
読みながら進めてみます(22時からネトゲのイベントがあるので休み休みですがw
まずはPythonをインストールから
skawa( @skawa )さんより教えてもらったステレオフォトメーカーのサイト
これは奥が深いなぁ。。。
むっちゃんのステレオワールド
http://stereo.jpn.org/jpn/index.html
iPhone12 Proのポートレートモードで撮影した深度マップ付きjpegファイルを、@skawa さんに情報提供して頂いたステレオフォトメーカーで見てみる。
深度マップを可視化すると、こういう風に見えるのか。。。
iPhoneの多眼カメラ程度の視差で、ここまで奥行きの情報が得られるのか。。。
ちょっと感動
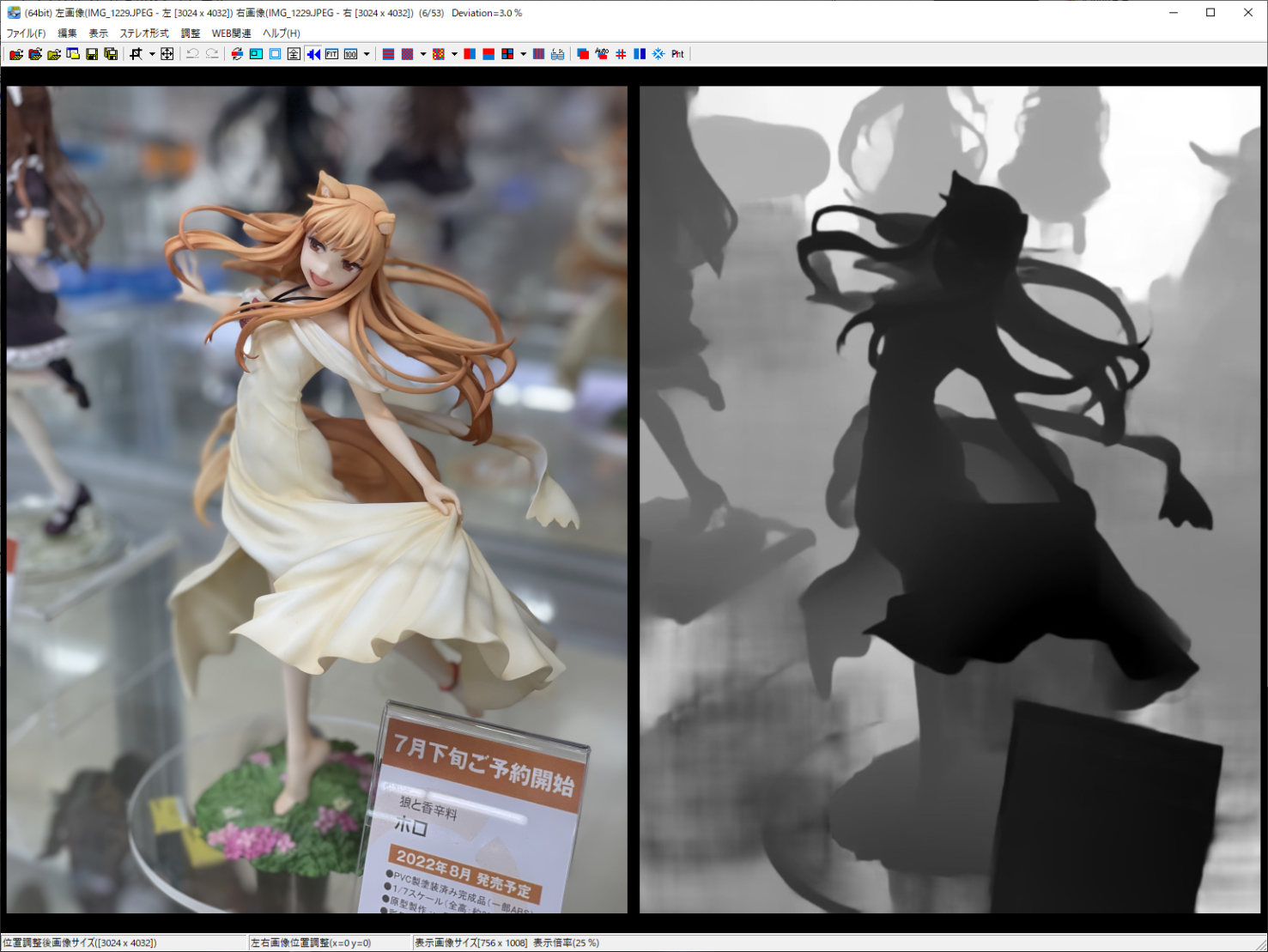
秋葉原のフィギュア展示 深度情報付き
秋葉原のフィギュア展示を、iPhone12 Proのポートレートモード(深度情報付き)で撮ってみました。
全部のデータは、まだ確認できていませんが、Looking Glass Portrait上で、なかなかの立体感で見えてます。
あ~ iPhone12 ProのLiDARは、明所でのポートレートモード撮影には寄与しないのか
@shingo1228 件のRF 100mm マクロを触ってみる。
見た感じ重心位置から大きく外れたところに三脚穴が位置します。
やはり、こうなると三脚が必要なシチュエーションにおいては、もう少しレンズ先端側に三脚穴が欲しくなりますねぇ
シンゴ
さんがブースト

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
RF 100㎜ マクロ の三脚座ってどういう用途で使うんだろう…RFマウントのボディ剛性の問題とか?
730gならそんなに重いとも思わないけど…w
100mmクラスの等倍(等倍以上)マクロ撮影ともなると、僅かな振動でもブレまくりになります。
またAFが効きづらい被写体相手だと自然とMFでフォーカスを合わせる必要があり、レンズを直接操作(=振動発生要因)することになります。
そこで、カメラ+レンズの重心に近いところに三脚穴を配置することで、上記の振動を出来るだけ早く収束させることを狙ったものだと思います。
{kind=link}
{kind=link}
2017年 4月 に登録
